|
NTRT Simulator
Version: Master
|
|
NTRT Simulator
Version: Master
|
#include <ScarrArmController.h>
Public Member Functions | |
| ScarrArmController (const double prefLength, double timestep) | |
| virtual | ~ScarrArmController () |
| virtual void | onSetup (ScarrArmModel &subject) |
| virtual void | onStep (ScarrArmModel &subject, double dt) |
| virtual void | onAttach (ScarrArmModel &subject) |
| virtual void | onTeardown (ScarrArmModel &subject) |
Protected Member Functions | |
| virtual vector< vector< double > > | transformActions (vector< vector< double > > act) |
| virtual void | applyActions (ScarrArmModel &subject, vector< vector< double > > act) |
Preferred Length Controller for ScarrArmModel. This controllers sets a preferred rest length for the muscles. Constant speed motors are used in muscles to move the rest length to the preffered length over time. The assumption here is that motors are constant speed independent of the tension of the muscles. motorspeed and movemotors are defined at the tgBasicActuator class.
Definition at line 47 of file ScarrArmController.h.
| ScarrArmController::ScarrArmController | ( | const double | prefLength, |
| double | timestep | ||
| ) |
Construct a ScarrArmController with the initial preferred length.
Definition at line 43 of file ScarrArmController.cpp.
|
inlinevirtual |
Nothing to delete, destructor must be virtual
Definition at line 62 of file ScarrArmController.h.
|
inlinevirtualinherited |
Notify the observers when an attach action has occurred. Will only occur once, typically before setup
| [in,out] | subject | the subject being observed |
Definition at line 55 of file tgObserver.h.
|
virtual |
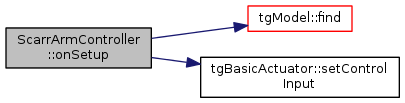
Notify the observers when a setup action has occurred.
| [in,out] | subject | the subject being observed |
Reimplemented from tgObserver< ScarrArmModel >.
Definition at line 49 of file ScarrArmController.cpp.
|
virtual |
Notify the observers when a step action has occurred.
| [in,out] | subject | the subject being observed |
| [in] | the | number of seconds since the previous call; must be positive |
Implements tgObserver< ScarrArmModel >.
Definition at line 89 of file ScarrArmController.cpp.
|
inlinevirtualinherited |
Notify the observers when a teardown action has occurred.
| [in,out] | subject | the subject being observed |
Definition at line 67 of file tgObserver.h.
 1.8.6
1.8.6 
